Sep 5, 2023
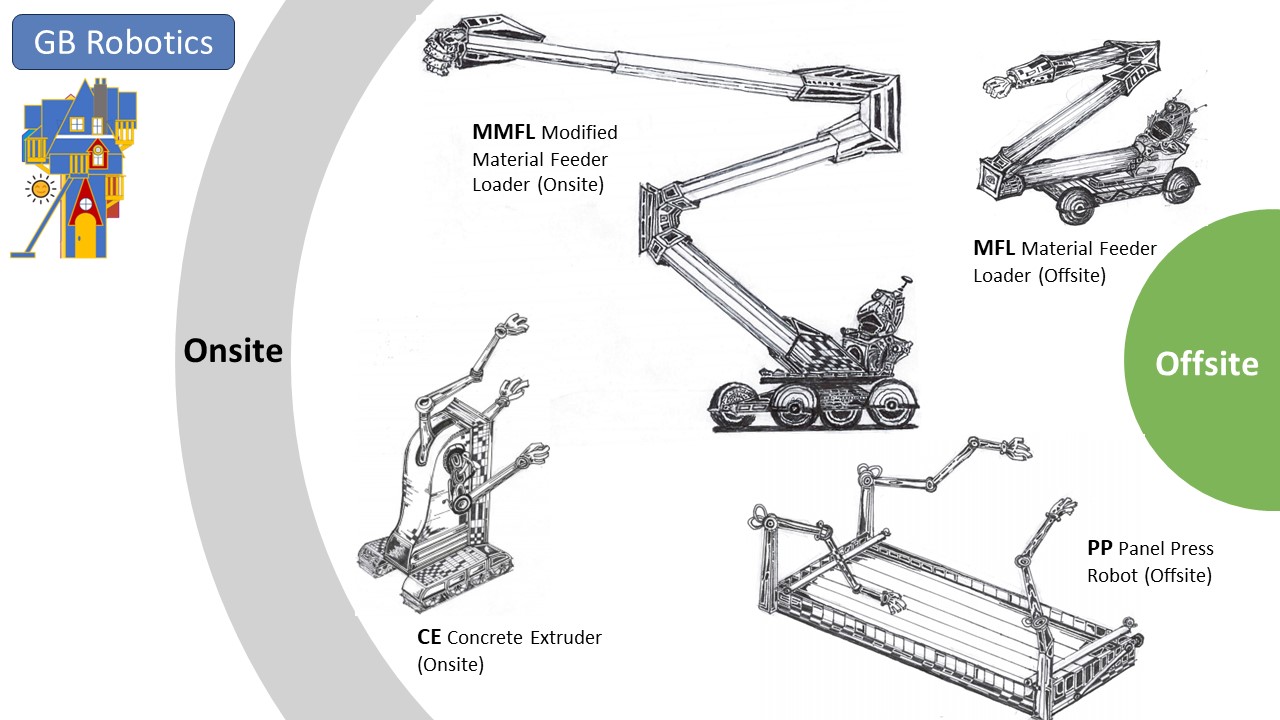
While David Johnson was working on his MBA in AI Robotics, (U Cumbria, 2020), it became very apparent that the need for robotics in the residential construction industry would be a useful application needing some serious robotic attention. David’s dissertation developed the idea of using four construction robots to build GB Cottages but he had no idea how much work would be involved on the R&D software programming side of things. Defining what each individual robotic application would look like was key, such as the MMFL Robot which would require novel algorithms because of its size, capacity and its unprecedented use onsite, (see diagram). John Morrell, a graduate student at BYU, (MS, 2023, Brigham Young University) developed a baseline optimization algorithm for the MMFL that calculates using Kinematic and Dynamic metrics for better control. JM’s work lays the foundation for all GB Robotic Applications for cost efficiency purposes and effective ROI. His thesis considered the following:
“An important concept to understand is that modern control techniques have the capacity to extract more of the potential performance from the systems they control than previous methods. They do this by making better use of the resources and capabilities of the underlying physical systems. This means that design improvements that improve the acceleration, expand the reachable workspace, or incorporate effective redundancy of the robotic systems being controlled are more effectual than ever; as control methods become more advanced, improving the kinematic and dynamic performance of the underlying system becomes more important than ever.
The Problem: Consider the problem of designing a robot for a specific task. Suppose we are interested in automating the construction of houses and wish to design a robot that will carry and place components on the job site. Creating a robotic system to perform this task involves addressing two aspects of the design: the physical design of the robot, and how the controller will function. Each of these problems has its own associated design requirements. For the physical system, some requirements might include:
• The physical reach of the system
• The load bearing capability
• The cost of the design
• The availability of required components
The requirements of the controller, on the other hand, might include:
• The speed and responsiveness of control
• Robustness and reliability of motion planning algorithms
• The freedom of motion of the robot throughout its workspace
When these two problems are considered separately, the task of designing the combined system is difficult. There may be a whole family of physical designs that meet the physical design requirements. Picking a design from this family that also has good performance under control, however, could be extremely difficult. A given design might be incapable of dexterous movement, and thus even though it can reach the entire work site, it might be practically difficult to maneuver it through that space. It might be perfectly capable of bearing heavy loads, but due to the geometry or choice of actuators be limited in its ability to accelerate quickly, resulting in unacceptably slow operation. One approach to this difficulty might be to design iteratively by creating a physical design, designing a controller, evaluating the controlled performance, and returning to the physical design if the performance is poor. This approach can be slow and expensive, as prototypes must be repeatedly constructed and tested. It may also miss certain optimal designs that could only be discovered by co-design of the physical and control characteristics. It would be far more effective to consider the kinematic and dynamic attributes of the physical design and pick designs that are known to have good performance. The question then is how to accomplish this; the kinematic and dynamic control of robot arms is a complex task that can be computationally intensive, and in the course of design it may be necessary to consider thousands or (if computer aided design optimization is employed) millions of different physical designs.
The main contributions of this thesis include:
• An entirely novel kinematic metric, the Actuator Independence Metric, which characterizes the dexterity of a robot arm by analyzing the unique kinematic contributions of each joint in the arm
• A new and extremely efficient geometric method for calculating the acceleration radius of serial robot arms
• An optimization framework that incorporates design constraints and desirable design metrics to create an approximate Pareto front of designs for a given task”
(Source, John Morrell, https://bitbucket.org/byu_rad_lab/acceleration_radius/src/optimization_example/)
Aa a result of JM’s work GB Robotics now has a solid robotic foundation from which we can moving forward, design virtually any type of construction/manufacturing robotic arm that will help automate GB Systems by first addressing efficiencies and cost analysis to show a greater ROI by going robotic.
 Rebert Kosta
Rebert Kosta








